Noticias
dsPIC obtiene dos núcleos rápidos de 16 bits para acelerar el desarrollo de la potencia de alto rendimiento y el control del motor
Destinado a acelerar el desarrollo del código al eliminar la dependencia entre la interfaz del usuario y el código en tiempo real, los núcleos son en gran parte independientes, cada uno con su propio conjunto de periféricos y se comunican entre sí solo a través de FIFO y buzones de correo. no compartido.
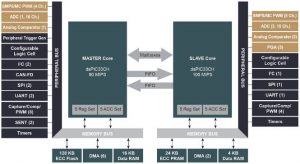
Dentro dsPIC33CH, como se conocerá a la familia, los núcleos son similares, con uno que funciona a 90 MHz designado como "maestro" y un "esclavo" a 100 MHz. El maestro tiene más interfaces seriales, mientras que el esclavo tiene más ADC, canales PWM y comparadores, por ejemplo (ver diagrama).
"El núcleo esclavo es útil para ejecutar código de control dedicado y de tiempo crítico, mientras que el núcleo principal está ocupado ejecutando la interfaz de usuario, las funciones de supervisión y comunicaciones del sistema, personalizadas para la aplicación final", dijo la firma. "El dsPIC33CH está diseñado específicamente para facilitar el desarrollo de código independiente para cada núcleo por equipos de diseño independientes y permite una integración perfecta cuando se unen en un solo chip.
Las aplicaciones potenciales incluyen potencia digital y control de motores, por ejemplo en energía inalámbrica, servidores, drones y sensores automotrices.
En una fuente de alimentación digital, de acuerdo con Microchip, el núcleo esclavo administra los algoritmos intensivos en matemáticas, mientras que el núcleo principal administra de forma independiente la pila de protocolos PMBus y proporciona monitoreo del sistema. En un ventilador o bomba automotriz, el núcleo esclavo gestionaría la velocidad crítica del tiempo y el control del par, mientras que el maestro gestiona la comunicación CAN-FD (CAN-velocidad de datos flexible), la supervisión del sistema y el diagnóstico.
Las actualizaciones de firmware en vivo ('cero tiempo de inactividad') son posibles en ambos núcleos porque cada uno de ellos tiene dos tiendas de programas flash: cuatro en total.
Si no se necesitan actualizaciones en vivo, el doble de la cantidad de memoria del programa está disponible para el núcleo.
Comparado con la familia dsPIC anterior dirigida al mismo mercado - dsPIC33EP / GS - el rendimiento casi se duplica (latencia baja de 543ns a 280ns) - parcialmente a través de la velocidad de reloj aumentando de 70MHz a 100MHz y parcialmente a través de: cambio de contexto más rápido (acumuladores contextuales y registros de estado) y nuevas instrucciones (división más rápida, carga / almacenamiento de 32 bits).
Hay ocho variantes de paquete, desde 28 pines dsPIC33CH64MP202 hasta 80 pines, y desde 5 x 5 mm en adelante.
Las opciones de flash abarcan de 64 a 128 kbytes.
El soporte proviene de:
- MPLAB X IDE
- Configurador de código
- dsPIC33CH Curiosity Board (DM330028)
- Módulo enchufable dsPIC33CH para control del motor (MA330039) para MCLV-2 y MCHV-2/3
- Módulo enchufable dsPIC33CH para plataformas de uso general (MA330040) para Explorer 16/32 (DM240001-2)