Noticias
Comentario: Mida la distancia con el sensor de distancia VL53L1X de ST

Crear imágenes de "color" no es nuevo. El sensor Kinect de Microsoft les presentó a los desarrolladores información espacial: un truco que STMicroelectronics ahora hace manejable a través de sus monolitos de sensor de distancia basados en láser, que son ideales para sensores de aterrizaje de drones, encendedores sensibles a la distancia y otras baratijas.
Todo en uno…
A diferencia del sensor utilizado en el Kinect, el sensor de ST es "unidimensional". La ventana óptica en la parte superior del chip actúa como visor y emisor, mientras que la distancia a los "objetos" enfrente del detector se devuelve como un valor unidimensional (piense: algo está a 50 cm de mí).
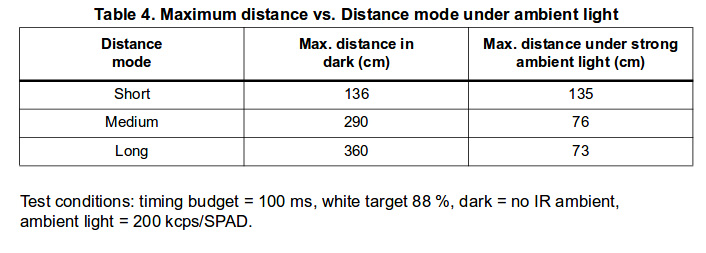
Además, el uso de la tecnología láser hace que el sistema sea casi completamente independiente del material objetivo; los problemas relacionados con el color conocidos por los componentes IR clásicos no deberían ocurrir aquí.
La conectividad del sensor de host se realiza a través del bus I2C: lamentablemente, ST no expone un selector de direcciones, lo que lo limita a un sensor por controlador de bus. El protocolo de comunicación real se describe en un documento separado: como a ST le encanta cambiar sus esquemas de URL, simplemente google para UM2356 para encontrarlo (pero "al no exponer los selectores de dirección en el hardware, es posible seleccionar la dirección a través de comandos durante el inicio del sensor", según un comentario publicado a continuación por Martin Palsson, quien incluyó más detalles (desplazarse hacia abajo)).
Además, un controlador escrito en C se pone a disposición de los implementadores de ayuda.
Si bien el consumo de corriente es moderado en el rango de menos de 20 mA cuando está activo, los usuarios deben tener en cuenta el voltaje máximo de suministro de 3V5. Esto hace que la integración del sistema en buses de 5V I2C sea difícil: una palanca de cambio de nivel compuesta por dos FET es una solución (ver direccionalLevelShiftery nota de aplicación)
Calibrame!
La mayoría de los sensores requieren modificaciones en el diseño de la carcasa: sin un corte "a la vista", ocurren todo tipo de problemas extraños. ST simplifica esto mediante una rutina de calibración dedicada, que debe ejecutarse en todas las unidades de fábrica. Esto también elimina las diferencias ópticas individuales en la "ventana" y da cuenta de cualquier cambio causado por la readaptación.
Otro buen aspecto es la capacidad de establecer la "región de interés". Si bien el campo de visión, por defecto, es bastante ancho, la matriz óptica se puede ajustar para limitarlo. En una similitud muy similar al Kinect mencionado anteriormente, el rango de detección también se especifica en "clases".
La única desventaja de la pieza es la huella increíblemente pequeña. ST usa una carcasa sin plomo (Optical LGA) que tiene 4.9 × 2.5 × 1.56 mm de tamaño pequeño: mientras que el paquete se puede volver a filtrar con facilidad, instalarlo en un prototipo usando una estación de soldadura es casi imposible.
Al igual que con todos los chips nuevos, la disponibilidad es un problema. En OEMsecrets, los precios oscilan entre 2.8 € y 5 € en pequeñas cantidades, como siempre, una comparación de precios es el amigo de su billetera. ¡Vea abajo!
En g. Tam HANNA ... ha trabajado en el espacio integrado desde el momento en que el PIC 16F84A estaba caliente. Después de algunos años de informática móvil, su compañía de consultoría Tamoggemon Holding k.s. se ha reenfocado en el diseño de hardware.
Ver también: El sensor ST ToF amplía el alcance de detección de FlightSense a 4m